研究紹介
・競争的資金
1)日本学術振興会 科学研究費助成事業 挑戦的研究(萌芽)
研究代表者(2022年5月~2025年3月)
高次元幾何空間における接触インタラクションを通した
空間認知に関する基礎的研究
2)日本学術振興会 科学研究費助成事業 基盤研究(B)
研究代表者(2020年4月~2024年3月)
形状記憶合金の高速変態制御による触覚提示と双方向触覚コミュニケーションの実現
3)日本学術振興会 科学研究費助成事業 挑戦的研究(萌芽)
研究代表者(2019年6月~2022年3月)
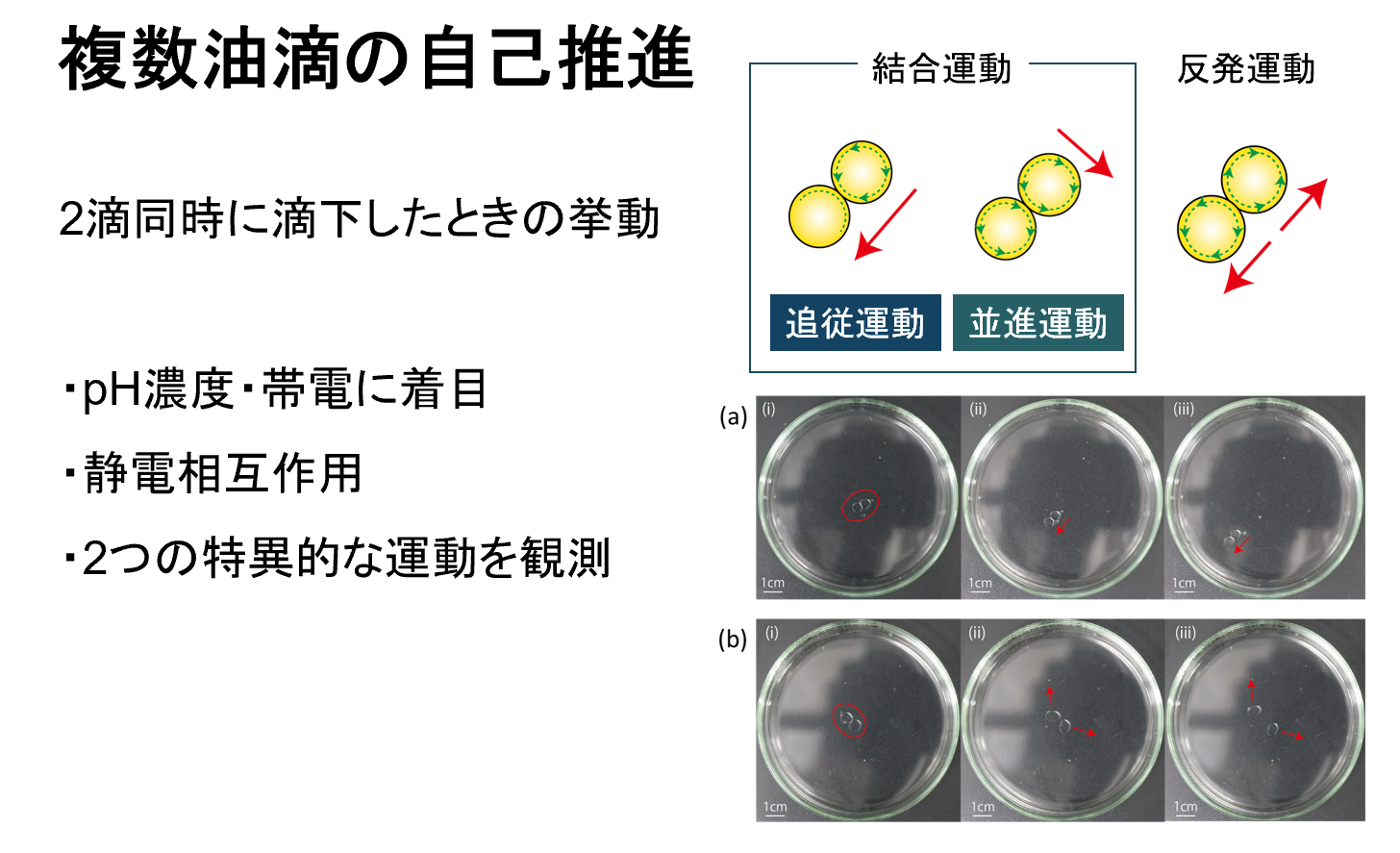
化学反応に基づく油滴の内部対流を使った自走制御と水上物体搬送への適用
4) 日本学術振興会 科学研究費助成事業 新学術領域研究(研究領域提案型)
研究分担者(2018年6月~2023年3月)
ストカスティックマシンの創成を通じたソフトロボティクスの攻究
・メディアでの紹介
1) メタバース総研
早稲田大学 先進理工学部 応用物理学科 澤田秀之研究室:
形状記憶合金ワイヤの微小振動を利用した触覚感覚の計測と提示
2) GLOBAL MACRO
早稲田大学 澤田秀之研究室:
力覚による接触感覚提示を伴う4次元空間インタラクションシステムの構築
3) Reuters
A Path to Safety: Japan as a leader in removing landmines and supporting victims
4) Deutsche Welle
How Japan uses heavy machinery and AI to clear Ukraine mines
5) Waseda Weekly
News 2025/11/11:
国際エンジニアリングアワードで国内最優秀賞!全方位移動ロボットを提案
・3rd International Workshop on Active Matter for Soft Robotics
過去10年間、特に結晶やポリマーなどの有機機械材料が外部の刺激(光、熱、電気など)によって巨視的に動く能動物質(アクティブマター)が、材料化学の分野で積極的に研究されてきました。この間に、多くの応答性材料が開発され、ソフトセンサーやアクチュエーターとして広く導入されてきました。外部の刺激によって自律的に動くことができるこのような機械材料は、安全性と快適性に優れたソフトロボットや、生物科学分野での作業に適したマイクロロボットの新たな材料として有望です。
本ワークショップには、アクティブマターの開発に取り組む物理学者、化学者、ロボットエンジニアが集まります。アクティブな構造を持つポリマーや、ポリマーに組み込むためのアクティブ粒子など、様々なアクティブマターに関する議論が行われます。また、機械的な応答性を持つアクティブマターは、ソフトロボットへの最適な応用となります。新たな研究やこれらのソフトロボットやマイクロロボットへの応用について、詳細な議論が行われます。
本ワークショップは、ソフトロボットにおけるアクティブマターの研究に焦点を当て、異なる分野の研究者との新たな国際的な協力関係の創出と促進を目指しています。
・研究グループ:
1. メディアグループ
メディアグループでは、画像情報処理、音楽、メタ・アルゴリズムに関する研究を行っています。画像情報処理では、デジタル画像処理技術を応用して、ロボットやコンピュータが外界を理解するために必要な画像認識技術を用いて研究しています。また、CG・VRを利用した情報の可視化と体験拡張、インタラクションの研究を通じて、人間の空間認識の仕組みを明らかにすることを目指しています。また、音楽に関する研究では、音声・音響信号に加え、人間の情緒的な行動などどといった情報を取り扱う、新しい音楽システムの構築を試みています。メタ・アルゴリズムに関する研究では、ニューラルネットに代表される学習型の情報処理システムを用いて、従来のコンピュータが苦手である、予測、制御、認識、合成、人間の感性を取り扱う研究を行っています。さらに、これらを制御に応用することで、学習を取り入れた新しい制御方法を試みています。
-
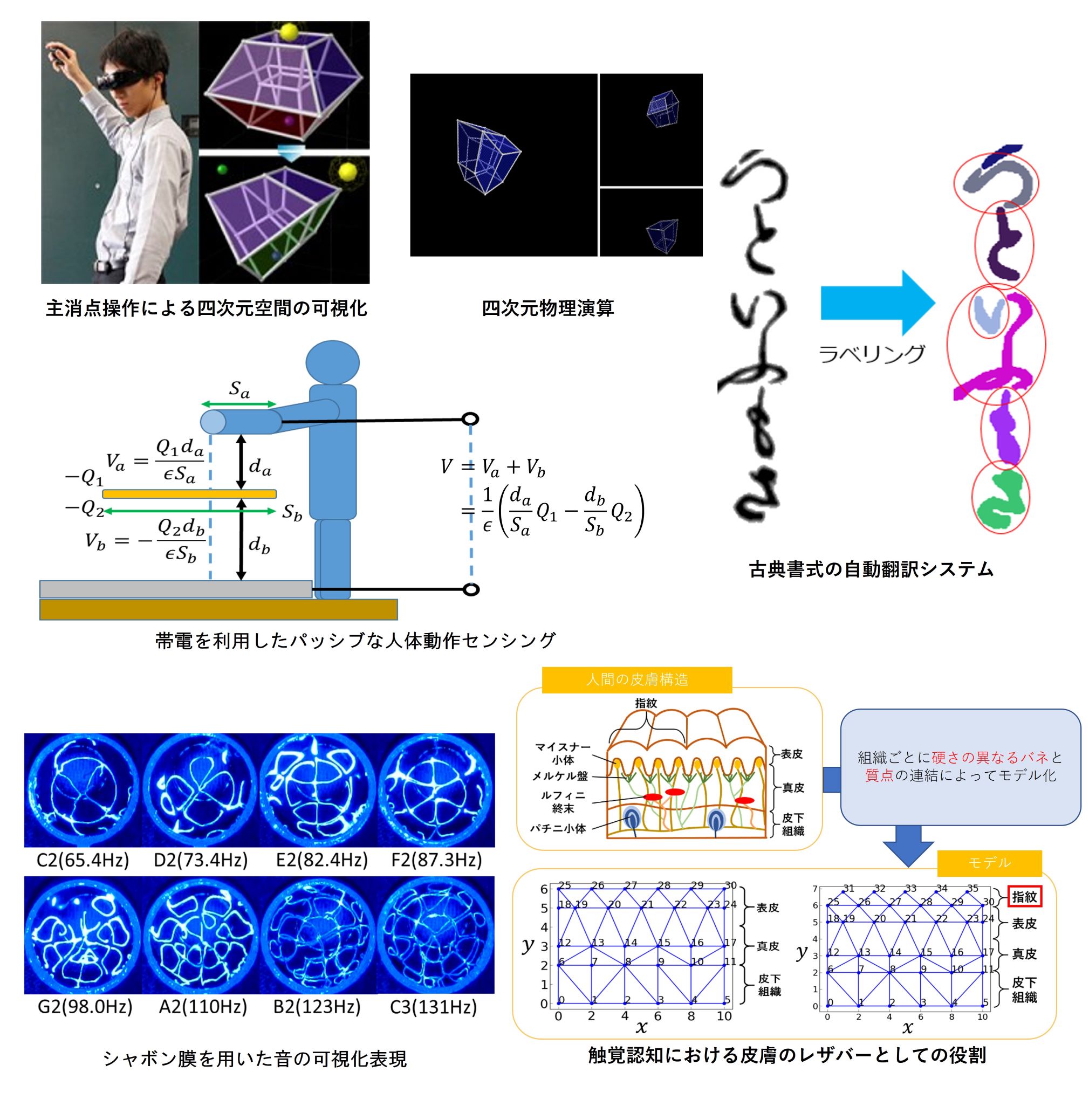
- 四次元空間ディスプレイの構築
- 古典書式の自動翻訳システムの構築
- ARを用いた仮想物体の触覚感覚の提示
- ディープラーニングを用いた聴取経験に基づく自動音楽作曲システムの構築
- 複数報酬とゲートによるモジュール型強化学習
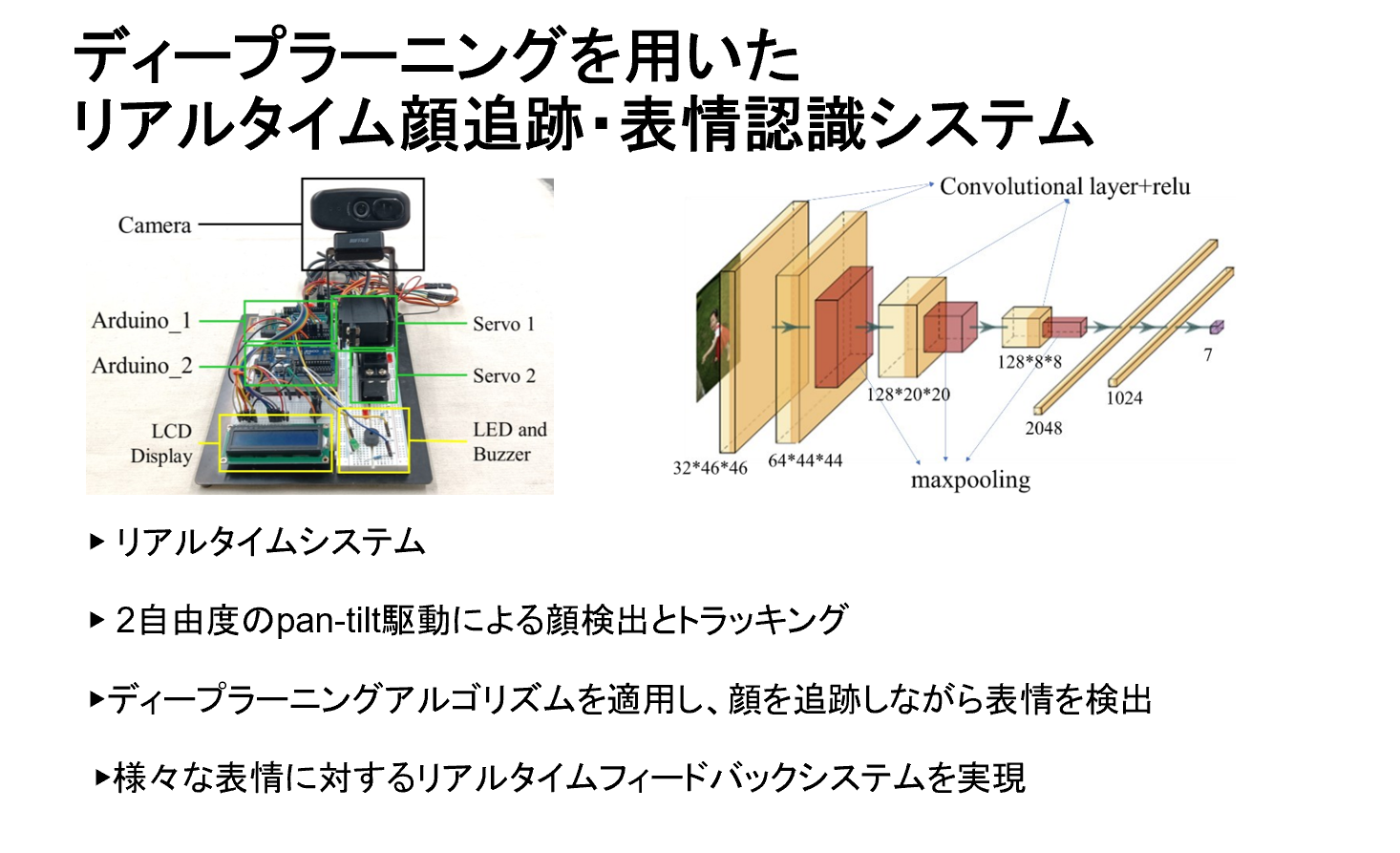
- ディープラーニングを用いたリアルタイム顔追跡・表情認識
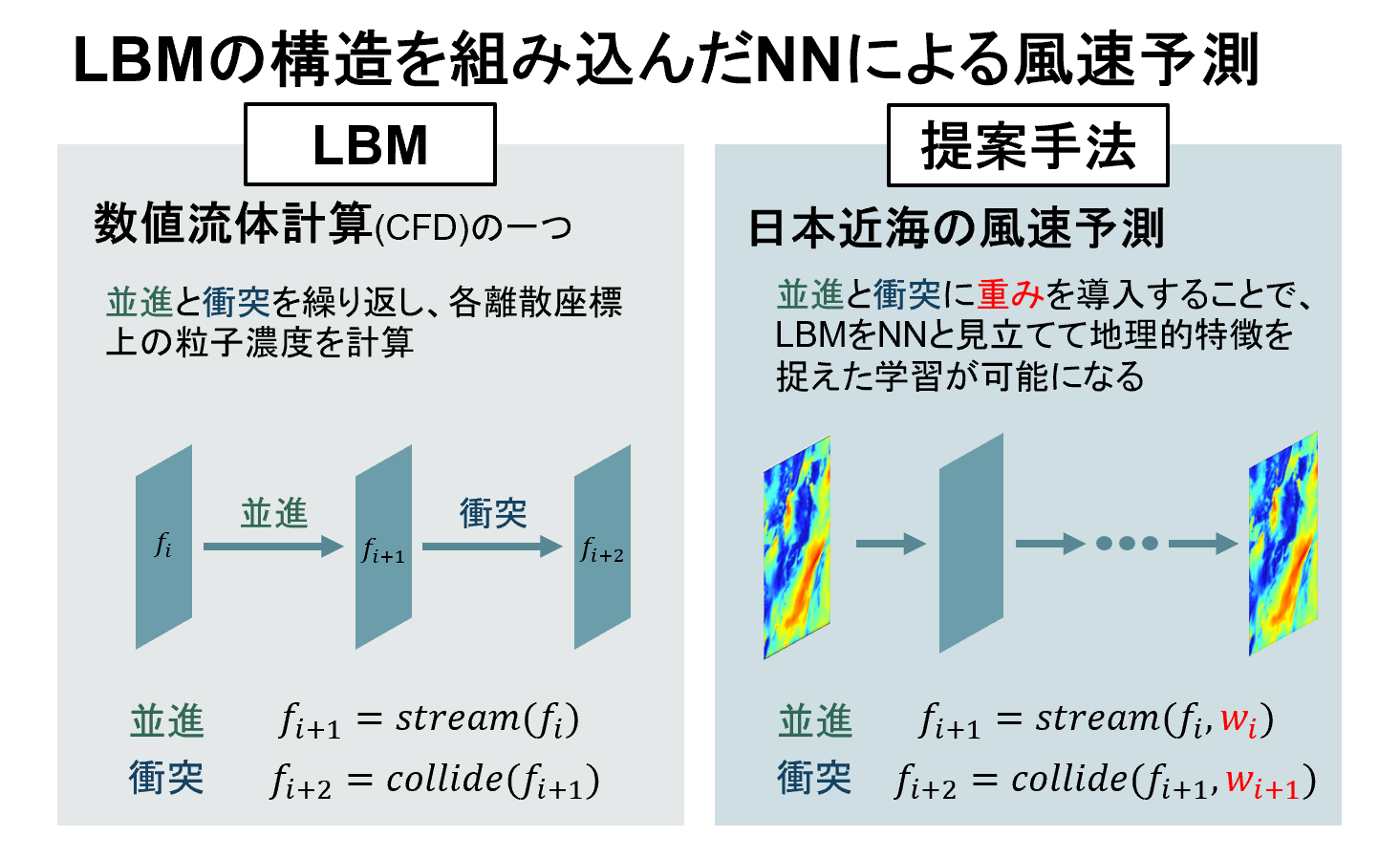
- LBMの構造を組み込んだニューラルネットワークによる風速予測
{kind=link}
{kind=link}
2. ロボティクスグループ
環境認識、動的制御、インタフェース、行動アルゴリズムなどといった、人間共存型ロボットの実現に必要な基礎技術の研究を行っています。早稲田大学ヒューマノイド研究所に参加し、人間型ロボットの認識システムの構築を行っています。
- 人間型ロボットの制御系システムの設計、構築、実装
- 段差を降りることのできる倒立振子型ロボット
- 振動子を用いたハプティックディスプレイ
- 口腔内動作を用いた多目的インタフェース
- 自動掃除ロボットのための汚れ分布を考慮に入れた効率的経路計画
- Control Moment Gyroscope を用いたパッティングのスイング軌道制御
- 逃亡者を捕獲するロボットの制御アルゴリズム
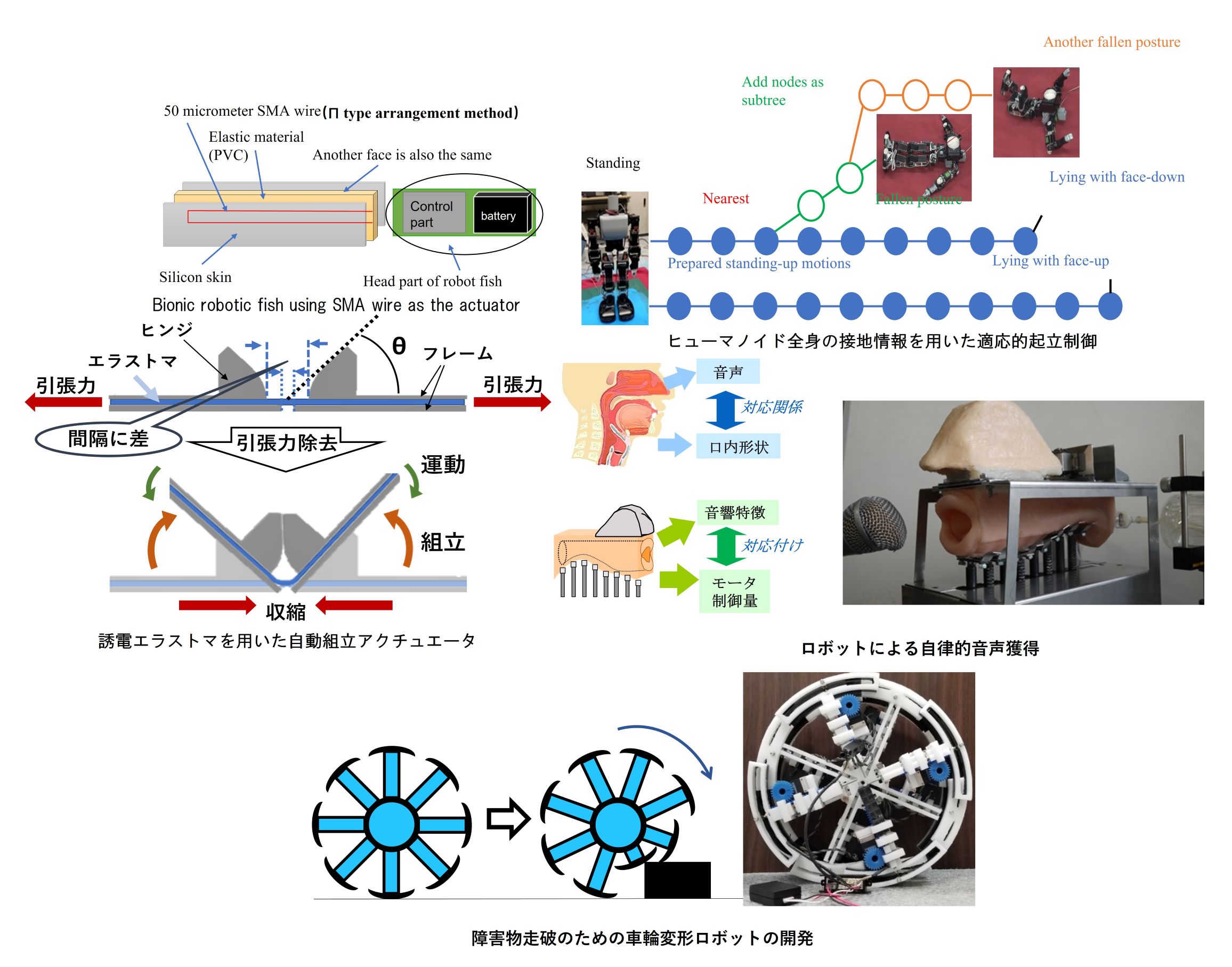
- ロボットによる自律的音声獲得
- バイオニクスロボット魚の設計、構築、実装と逆学習による姿勢制御
- SMAワイヤーを用いた3次元方向の遊泳を実現するエイ型ロボット
- 局所的に径が伸縮する自走球ロボットと転がり制御
3. ケミカルロボティクスグループ
自己複製や自律駆動といった生物特有の機能を持つロボットを実現させることは従来のロボットでは非常に困難であると考えられます。我々は一般的な機械システムではなくマテリアルに基礎を置いて生物に近いロボットを実現しようとしています。具体的には以下の様な研究を進めています。
-
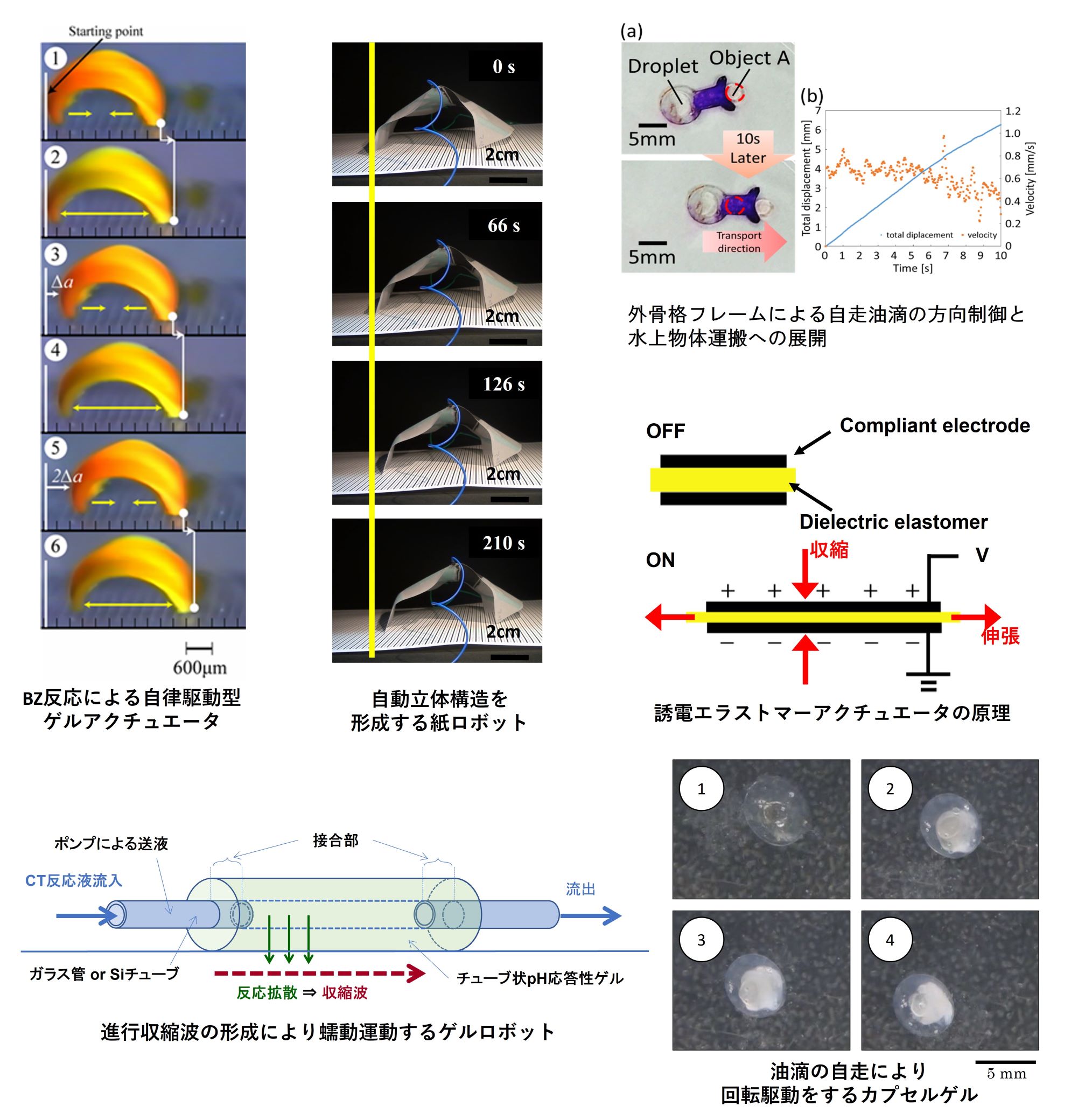
- 自律駆動型ゲルアクチュエータに関する研究
- 誘電エラストマーアクチュエータの周波数応答測定
- 筋繊維を模倣したナノファイバー型アクチュエータ
- 進行収縮波の形成により蠕動運動するゲルロボット
- 油滴の自走により回転駆動をするカプセルゲルの研究
- 高分子ゲル部品の自動組み立てに関する研究
- 印刷法による折り紙ロボットの開発
- 液滴の自走現象に関する考察
- 複数油滴の自己推進
{kind=link}
4. SMAグループ
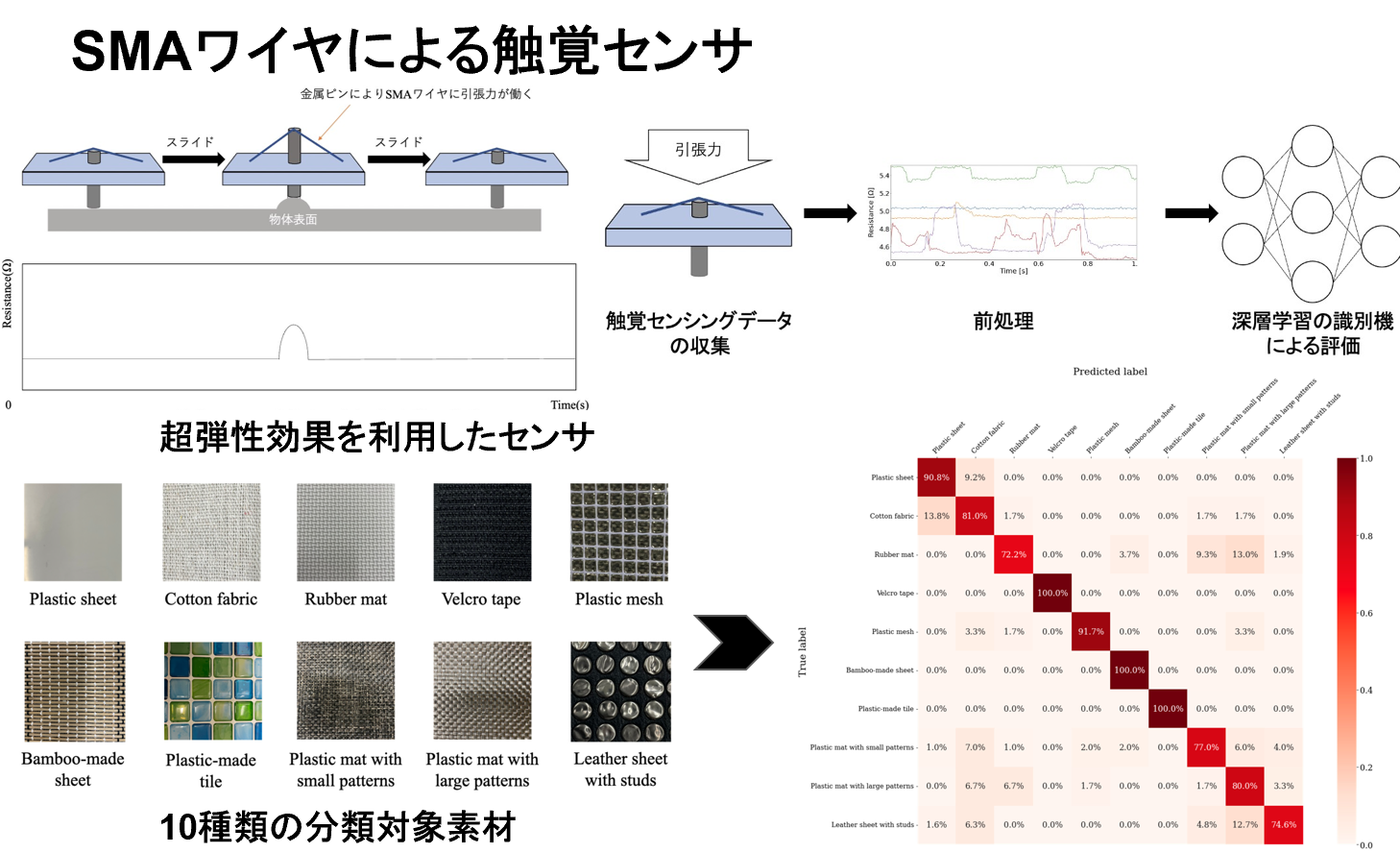
触覚は、目や耳のような特定の生体器官によって対象物の物理的構造を直接検出するのではなく、皮膚の変形や熱伝導といった物理現象を元に、皮膚下に複雑に配置された触覚受容器によって知覚され、これが脳に伝わって「体性感覚」として理解されていることが解っています。そのような触覚感覚を人のように知覚、理解するセンサ、そして映像や音声と同様に遠隔地へ伝送して呈示する技術の研究開発を進めています。
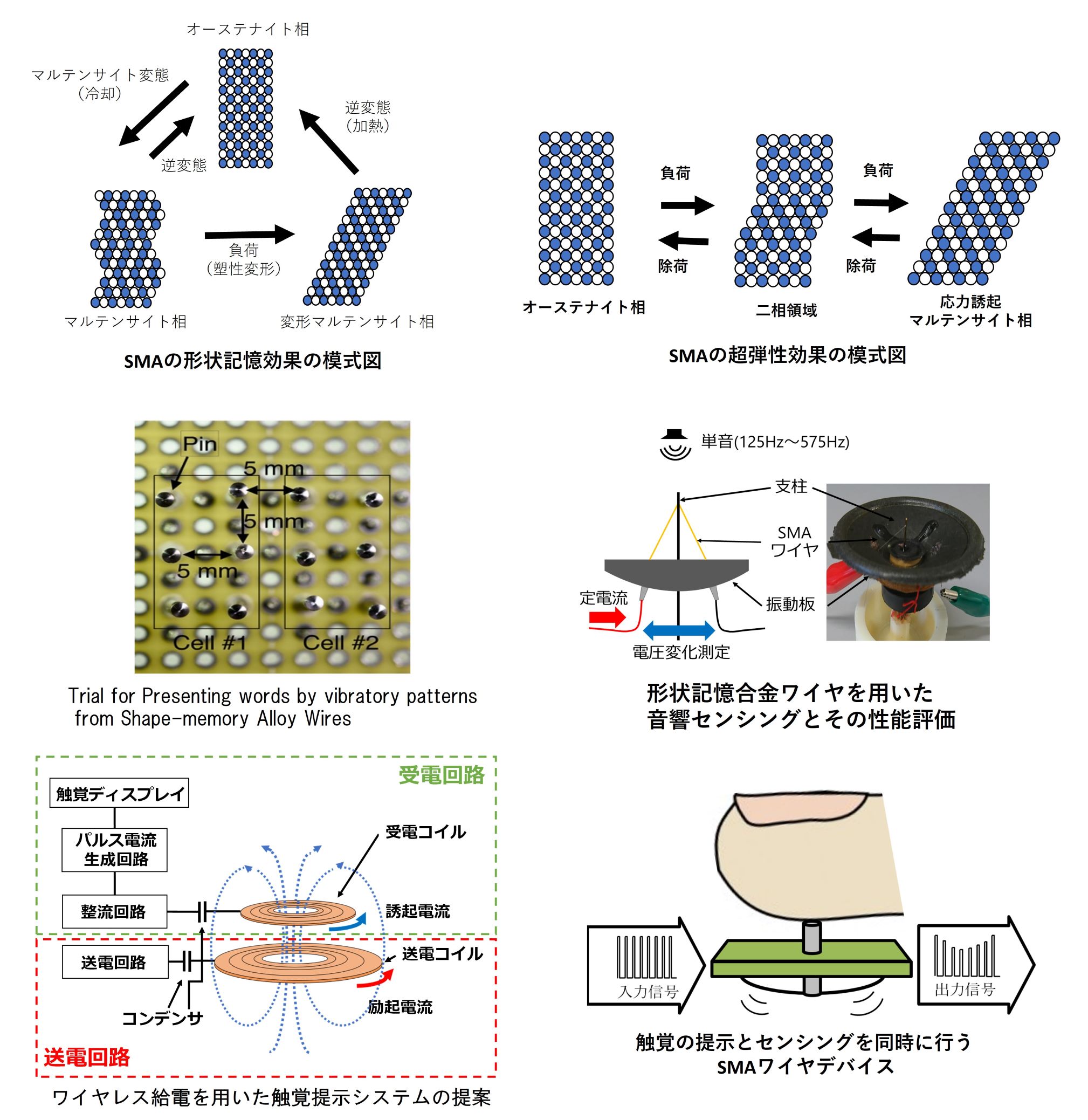
触覚感覚の生成、計測に、形状記憶合金(Shape-memory alloy: SMA)ワイヤを応用したアクチュエータ、センサの研究開発を進めています。温度で相変態を起こして変形するSMAは、これまでアクチュエータとしては動きが「遅い」ものと考えられていました。本研究室では、1 msec以下で変形を起こすSMAの特性とその制御手法を開発し、これを触覚アクチュエータ、センサとして利用する研究を行っています。
-
-
- SMAの相変態に関する物性の研究
- 効率的に変態を起こす新しいSMAの開発
- SMAワイヤの微小振動制御に関する研究
- 触覚アクチュエータ、触覚センサの構築に関する研究
- 触覚インタフェース、触覚インタラクションシステムの構築
- SMAアクチュエータを使った触覚ディスプレイの構築とマルチモーダル・インタフェースへの展開
- 形状記憶合金をアクチュエータとして用いたバイオニクスロボット魚の開発
- SMAワイヤーに基づくロボットアクチュエータ
-
{kind=link}
5. Artificial Intelligence
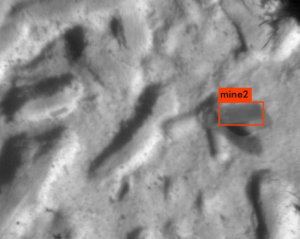
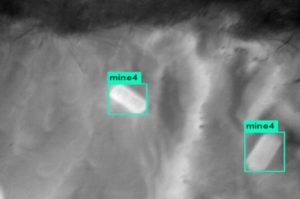
- AIを用いた地雷検出技術の開発(国際赤十字委員会ICRCとの共同研究)世界各地で起こる紛争後、住民が居住地に戻って生活を取り戻すには、埋設地雷や不発弾を見つけ出し、取り除くことが必要です。未だ1億を超える地雷が世界70か国以上に埋設されており、また日々この数は増え続けており、これらを効率的かつ安全に検出する技術が必要とされています。
我々は、Drone, 赤外線カメラ、AIを用いて、空中から埋設地雷、不発弾を検出、認識する技術の開発を進めています。