Projects
・Grant-in-Aid
1) Japan Society for the Promotion of Science, KAKEN, Challenging Research (Exploratory)
Research Investigator (May 2022 ~ March 2025)
A Study of Spatial Cognition in High-dimensional Geometric Space through Touch and Tactile Interaction
2) Japan Society for the Promotion of Science, KAKEN, Scientific Research (B)
Research Investigator (April 2020 ~ March 2024)
A study of the fast phase transformation of Shape-memory alloy wires and its application to tactile display and bidirectional tactile communication
3) Japan Society for the Promotion of Science, KAKEN, Challenging Research (Exploratory)
Research Investigator (June 2019 ~ March 2022)
Self-propulsion control of an oil droplet using chemical reaction and the application to in-water object transportation
4) Japan Society for the Promotion of Science, KAKEN, Scientific Research on Innovative Areas (Research in a proposed research area)
Co-Investigator (June 2018 ~ March 2023)
A quest for Soft robotics through creation of stochastic machines
・Referred in media
1) Metaverse Research Institute
Sawada Laboratory, Department of Applied Physics, School of Advanced Science and Engineering, Waseda University:
Tactile Measurement and Presentation using Micro Vibration of Shape-Memory Alloy wire
2) GLOBAL MACRO
Sawada Laboratory, Waseda University:
Development of 4D Spatial Interaction System with Force-Based Presentation of Contact Sensation
3) Reuters
A Path to Safety: Japan as a leader in removing landmines and supporting victims
4) Deutsche Welle
How Japan uses heavy machinery and AI to clear Ukraine mines
・Research Group
1. Media group
The Media Group conducts research on image processing, music, and meta-algorithms. In image information processing, we apply digital image processing technology and study using image recognition technology necessary for robots and computers to understand the external world. In addition, we aim to clarify the mechanism of human space recognition through information visualization and experience expansion using CG and VR, and research on interaction. In addition, in research on music, in addition to speech and sound signals, we are trying to construct a new music system that handles information such as human emotional behavior. In the research on meta-algorithms, we use research-based information processing systems such as neural networks to conduct research that deals with prediction, control, recognition, synthesis, and human sensibility that conventional computers are not good at. Furthermore, by applying these to control, we are trying new control methods that incorporate learning.
- Construction of four-dimensional space display
- Construction of Automatic Translation System of Classical Forms
- Tactile sense presentation of virtual objects using AR
- Construction of automatic music composition system based on listening experience using deep learning
- Modular Reinforcement Learning with Multiple Rewards and Gates
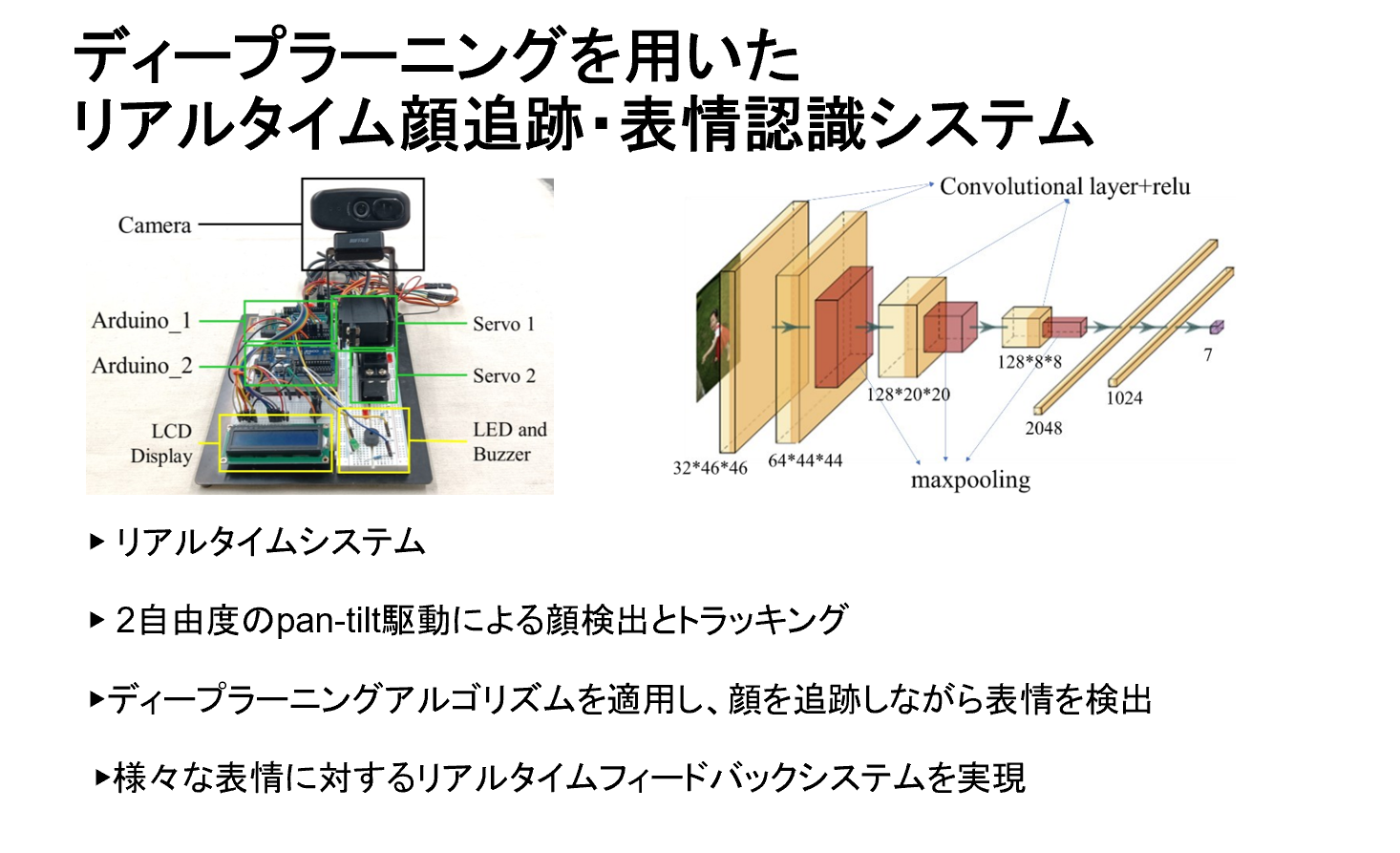
- Deep Learning-Based System for Real-Time Face Tracking and Expression Recognition
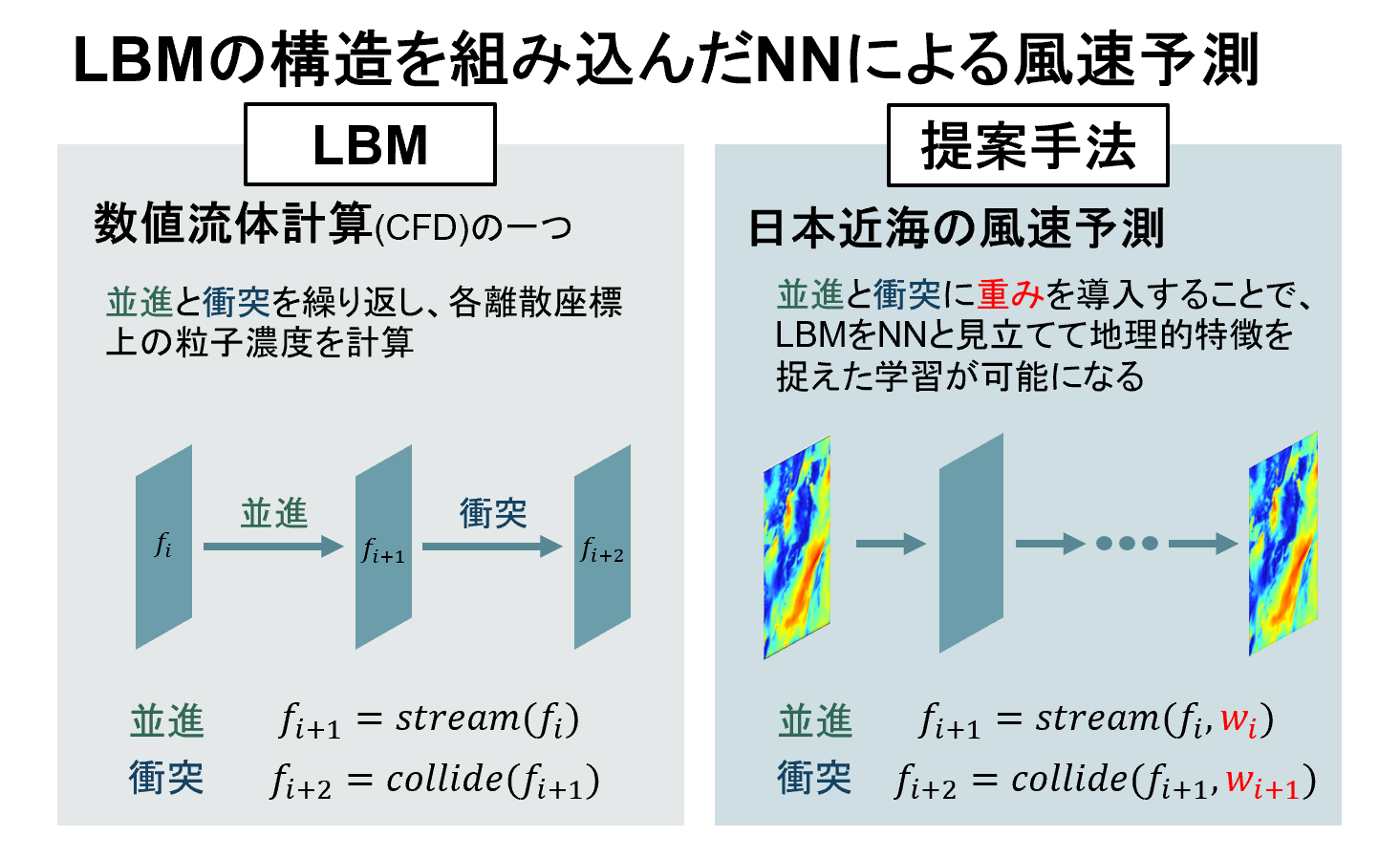
- Wind Speed Prediction using Neural Network with embedded structure of LBM
{kind=link}
{kind=link}
・Introduction Poster of Research Activities
{kind=link}
・3rd International Workshop on Active Matter for Soft Robotics
In the past decade, active materials (active matter), especially organic mechanical materials such as crystals and polymers that move macroscopically due to external stimuli (light, heat, electricity, etc.), have been actively studied in the field of materials chemistry. During this period, many responsive materials have been developed and widely introduced as soft sensors and actuators. Such mechanical materials, which can move autonomously upon external stimuli, are promising as new materials for soft robots with excellent safety and comfort, as well as for micro-robots suitable for tasks in the biological sciences.
This workshop will bring together physicists, chemists, and robotic engineers working on the development of active matter. There will be discussions on a variety of active matter, including polymers with active structures and active particles for integration into polymers. Active matter with mechanical responsiveness is also an ideal application for soft robotics. Emerging research and these applications to soft robots and micro-robots will be discussed in detail.
The workshop focuses on the study of active matter in soft robotics and aims to create and promote new international collaborations with researchers from different disciplines.
2. Robotics group
We are researching basic technologies necessary for the realization of human coexistence robots, such as environment recognition, dynamic control, interfaces, behavioral algorithms, etc. We participate in the Waseda University Humanoid Research Institute and are constructing a humanoid robot recognition system.
- Design, construction and implementation of control system of humanoid robot
- Inverted pendulum type robot that can get off the steps
- Haptic display using a vibrator
- Multi-purpose interface using intraoral movement
- Efficient Path Planning Considering Dirt Distribution for Automatic Cleaning Robot
- Swing trajectory control of putting using Control Moment Gyroscope
- Control algorithm of robot capturing fugitives
- Autonomous voice acquisition by robot
- Design, construction, and implementation of bionics robotic fish and attitude control by inverse learning
- Ray-shaped robot with SMA wire for swimming in 3-D direction
- Self-propulsion sphere robot with locally variable radius and rolling control
3. Chemical Robotics Group
It is thought that it is very difficult for conventional robots to realize robots with biological functions such as self-replication and autonomous drive. We are trying to realize robots close to living things based on materials rather than general mechanical systems. Specifically, we are promoting the following research.
- Study on self-driven gel actuator
- Frequency response measurement of a dielectric elastomer actuator
- Nanofiber-type actuator mimicking muscle fiber
- A gel robot with peristaltic motion due to the formation of progressive contraction waves
- Study of capsule gel driven by oil droplets self-propelled rotation
- Research on automatic assembly of polymer gel parts
- Development of origami robot by printing method
- Analysis of a self-propulsion droplet
- Multiple self-propulsion droplets
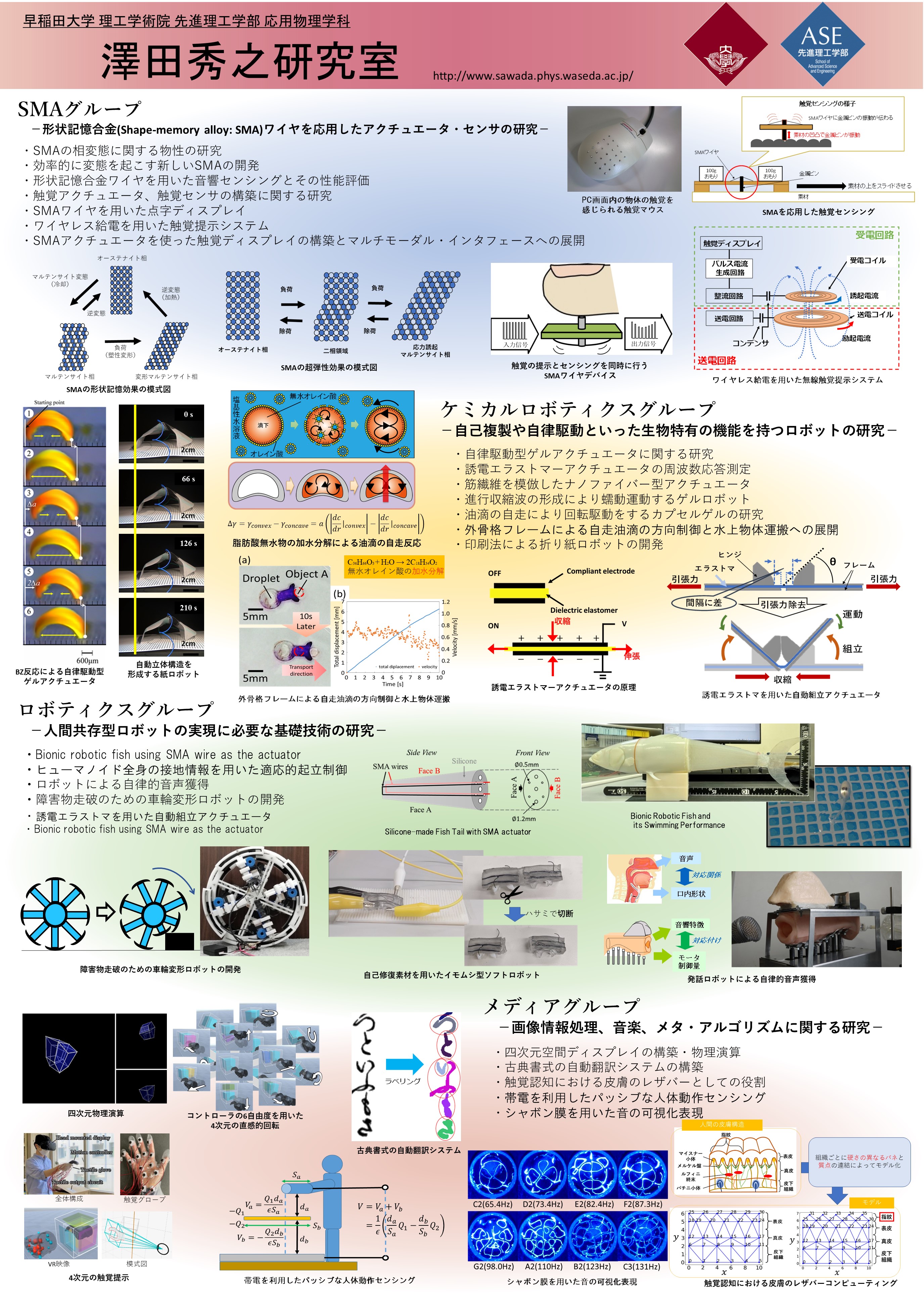
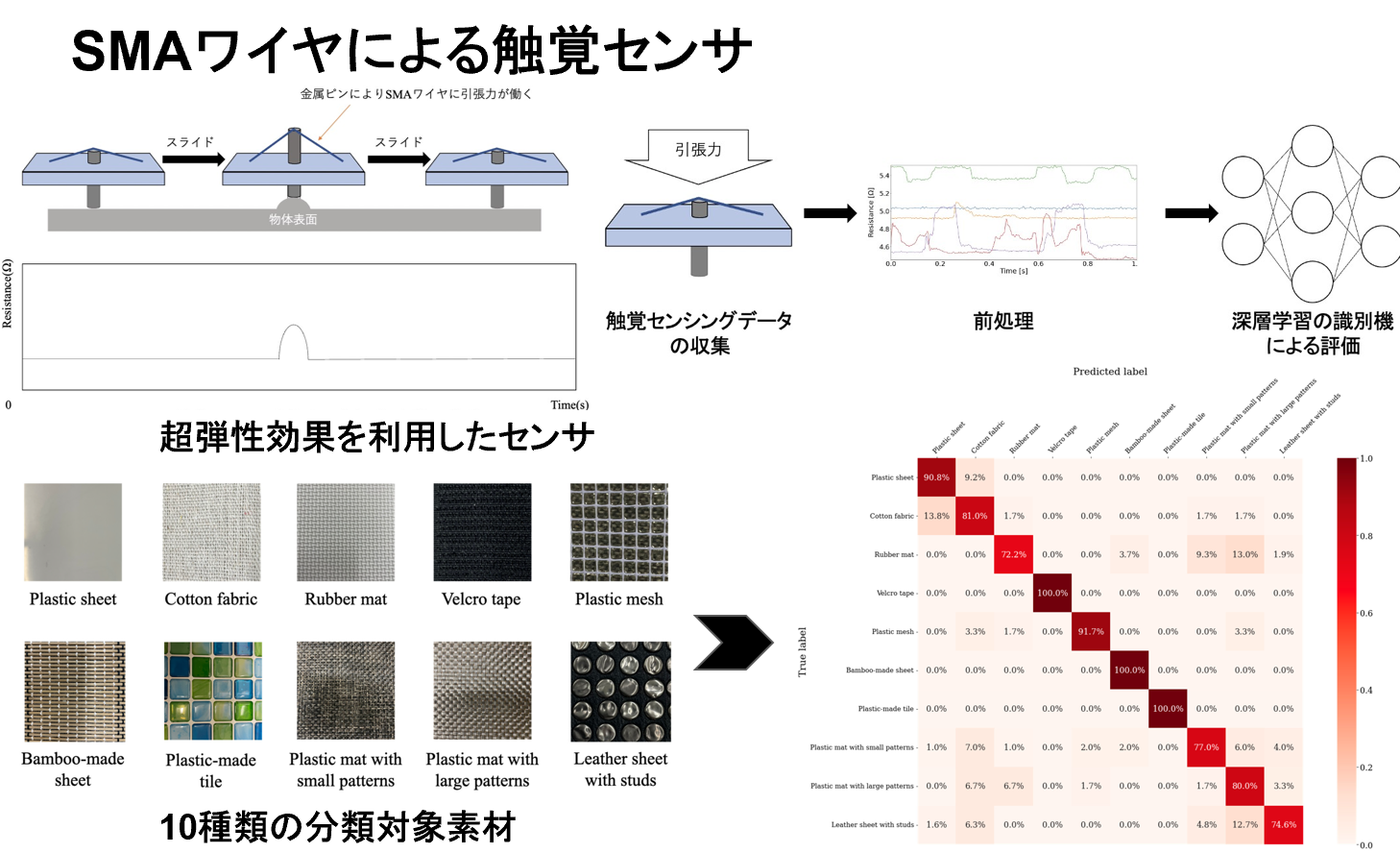
4. SMA group
The sense of touch is not a direct detection of the physical structure of an object by a specific living organ such as the eye or ear, but a sense of touch placed complexly under the skin based on physical phenomena such as deformation of the skin and heat conduction. It is understood that it is perceived by the receptor and this is transmitted to the brain and understood as “somatic sensation”. We are promoting research and development of sensors that perceive and understand such tactile sensations as human beings, and technology for transmitting and presenting them as well as video and audio to remote locations.
We are researching and developing actuators and sensors that apply shape-memory alloy (SMA) wires to generation and measurement of tactile sensation. In the past, SMA, which undergoes phase transformation at temperature, has been considered to be “slow” as an actuator. In our laboratory, we have developed the characteristics of SMA that causes deformation in 1 msec or less and its control method, and are conducting research to use this as a tactile actuator and sensor.
- Study of physical properties of phase transformation of SMA
- Development of a new SMA that causes transformation efficiently
- Study on micro vibration control of SMA wire
- Research on construction of tactile actuator and tactile sensor
- Tactile interface, construction of tactile interaction system
- Development of tactile display using SMA actuator and development to multimodal interface
- Development of a wireless bionic robotic fish using SMA actuators
- Robot actuators based on SMA wires
{kind=link}
5. Artifical Intelligence
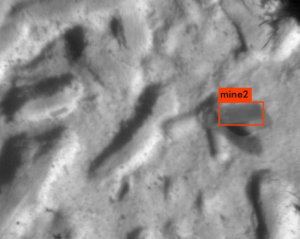
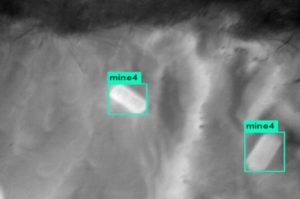
- Development of AI-based Landmine Detection Technology (in collaboration with the International Committee of the Red Cross (ICRC))
Following conflicts around the world, it is necessary to find and remove buried landmines and unexploded ordnance in order for people to return to their homes and resume their lives. More than 100 million landmines are still buried in more than 70 countries around the world, and the number is increasing every day. What is necessary is technology to detect them efficiently and safely.
We are developing a technology to detect and recognize buried mines and unexploded ordnance from the air using a drone, an infrared camera, and AI.