メンバー | Liu Renke
Renke Liu (Assistant Professor)
Contact: askar_liuATfuji.waseda.jp
Web intros and Publications:
scholar.google.com/citations?user=DgEwuHIAAAAJhl
researchgate.net/profile/Renke-Liu-3
Renke Liu is a researcher in applied physics, soft robotics, biomimetic robotic systems, shape memory alloy (SMA) actuation, and multi-material 3D printing at Waseda University. His research focuses on translating the anatomical structure and motion principles of the human hand into compact, compliant, and functional robotic systems. In particular, he works on highly biomimetic robotic fingers that integrate tendon-driven mechanisms, soft-rigid hybrid structures, and anatomically inspired joint and soft-tissue components.
Research
His research investigates SMA tendon-driven robotic fingers as a compact and muscle-like actuation approach for human-like finger motion. By combining SMA tendon actuation, agonistic–antagonistic mechanisms, cooling-enhanced thermal management, and feedback control, his work aims to realize stable and responsive robotic finger motion within a lightweight, compliant, and human-sized structure.
Beyond actuation, his research emphasizes anatomical fidelity. Key structures of the human finger, including bones, cartilage, ligaments, palmar plates, tendon sheaths, pulley systems, and the extensor hood mechanism, are incorporated into robotic finger designs to reproduce not only motion but also the underlying biomechanical organization of the human finger. Recent work further explores monolithic multi-material FDM fabrication, in which rigid skeletal elements and compliant soft-tissue-like structures are integrated in a single printing process.
Research Interests
His research interests include soft robotics, biomimetic systems, SMA artificial muscles, tendon-driven robotic hands, multi-material additive manufacturing, humanoid robotics, and human–robot interaction. His long-term research goal is to develop anatomically grounded robotic hand and body systems that combine structural biomimicry, compact actuation, and intelligent control for adaptive manipulation in human-centered environments.
リュウ ジンカ (助教)
早稲田大学先進理工学研究科・物理学及応用物理学専攻に所属し,ソフトロボティクス,生体模倣ロボット,形状記憶合金(SMA)アクチュエーション,およびマルチマテリアル3Dプリンティングを中心に研究を行っている。特に,人間の手指が有する解剖学的構造と運動機能に着目し,腱駆動機構,柔軟組織,関節構造を統合した高生体模倣ロボットフィンガーの開発に取り組んでいる。
研究紹介
形状記憶合金ワイヤを小型かつ筋肉様の腱駆動アクチュエータとして用い,人間の指に近い運動を実現するロボットフィンガーの構築を目指している。SMA腱駆動関節,拮抗型アクチュエーション,冷却機構,フィードバック制御を組み合わせることで,軽量で柔軟性を持つ人間サイズの構造内における安定した指運動の実現を検討している。
また,骨,軟骨,靱帯,掌側板,腱鞘,滑車機構,伸筋腱膜など,人間の指に見られる主要な解剖学的要素をロボット構造へ取り入れることで,単なる運動模倣ではなく,構造と機能の両面から生体模倣性を高めることを目指している。近年は,複数材料FDM 3Dプリンティングを用い,硬い骨格構造と柔軟な軟組織構造を一体的に造形するモノリシック製造手法にも取り組んでいる。
主な研究内容
ソフトロボティクス,生体模倣システム,SMA人工筋肉,腱駆動ロボットハンド,マルチマテリアル3Dプリンティング,ヒューマノイドロボット,および人間とロボットの自然なインタラクションである。将来的には,人間の身体構造に基づいたロボット設計と知能制御を統合し,より適応性と実用性の高いロボットハンド・ロボット身体システムの実現を目指している。
刘 仁可
主要从事应用物理、软体机器人、生物仿生机器人、形状记忆合金(SMA)驱动以及多材料3D打印相关研究。目前的研究重点是将人类手指的解剖结构与运动机理转化为紧凑、柔顺且具有功能性的机器人系统。具体而言,他致力于开发高度生物仿生的机器人手指,将腱驱动机制、软硬混合结构、仿解剖关节以及类软组织结构集成于机器人手指设计之中。
研究介绍
他的研究以SMA腱驱动机器人手指为核心,探索一种小型化、类肌肉的人工驱动方式,以实现接近人类手指的运动功能。通过结合SMA腱驱动关节、拮抗式驱动机制、强化冷却设计以及反馈控制方法,该研究旨在轻量、柔顺且接近人手尺寸的结构中实现稳定、可控的手指运动。
除驱动系统外,该研究也强调解剖学一致性。人类手指中的骨骼、软骨、韧带、掌侧板、腱鞘、滑车系统以及伸肌腱膜等关键结构被引入机器人手指设计中,从而不仅模仿手指运动结果,也尝试复现其背后的生物力学组织方式。近期研究进一步探索基于多材料FDM 3D打印的一体化制造方法,在单次打印过程中集成刚性骨架结构与柔性类软组织结构,以提高结构一致性、可重复性和制造效率。
他的主要研究兴趣包括软体机器人、生物仿生系统、SMA人工肌肉、腱驱动机器人手、软硬混合结构、多材料增材制造、类人机器人以及人机交互。长期研究目标是发展基于人体结构原理的机器人手与机器人身体系统,将结构仿生、小型化驱动和智能控制相结合,用于面向人类环境的自适应操作与自然交互。
Main Research
SMA腱駆動による高生体模倣ロボットフィンガー
Highly biomimetic robotic finger driven by SMA tendon actuation
人間の手指は,骨,関節,腱,靱帯,掌側板,腱鞘,滑車機構などが統合された複雑な運動器官であり,柔軟性,安定性,巧緻性を高い水準で両立しています.一方で,従来のロボットハンドは,剛体リンク,モータ,歯車,ワイヤ機構などを用いて指の運動を再現するものが多く,人間の指が持つ解剖学的構造や受動的な安定性を十分に反映できていない場合があります.
本研究では,形状記憶合金(SMA)ワイヤを人工筋肉のような腱駆動アクチュエータとして用い,人間の指の解剖学的構造に基づいた高生体模倣ロボットフィンガーの開発を行っています.SMA腱駆動関節,拮抗型アクチュエーション,冷却機構,フィードバック制御を組み合わせることで,小型かつ柔軟な構造の中で人間らしい指運動を実現することを目指しています.
さらに,骨,軟骨,靱帯,掌側板,腱鞘,滑車機構,伸筋腱膜などの構造をロボットフィンガーに取り入れ,ソフト・リジッドハイブリッド構造として再現しています.近年は,複数材料FDM 3Dプリンティングを用いて,硬い骨格構造と柔軟な軟組織構造を一体的に造形するモノリシック製造手法にも取り組んでいます.これにより,組立工程を減らしつつ,解剖学的整合性,再現性,製造容易性を高めることを目指しています.
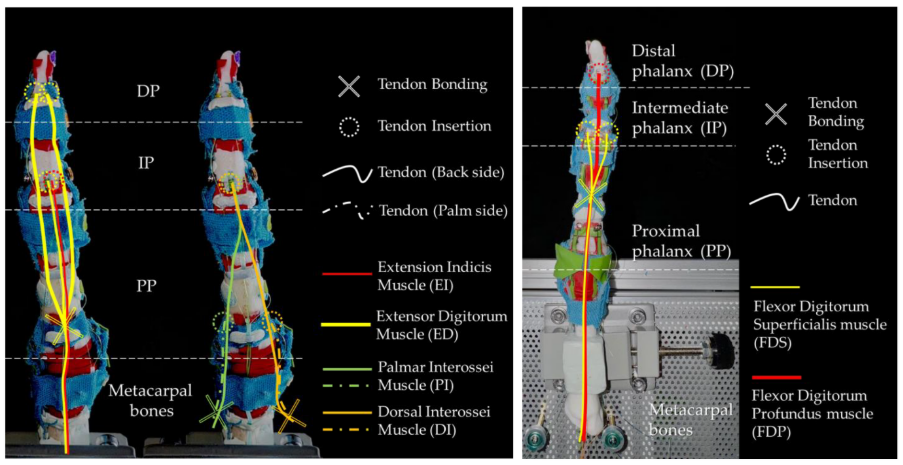
The human finger is a complex musculoskeletal system in which bones, joints, tendons, ligaments, palmar plates, tendon sheaths, and pulley mechanisms work together to achieve dexterity, compliance, and passive stability. In contrast, many conventional robotic hands reproduce finger motion using rigid links, motors, gears, or simplified tendon mechanisms, often without fully reflecting the anatomical organization and biomechanical characteristics of the human finger.
Our research focuses on the development of highly biomimetic robotic fingers driven by shape memory alloy (SMA) tendon actuation. SMA wires are used as compact, muscle-like artificial tendons, enabling tendon-driven joint motion within a lightweight and human-sized structure. By combining SMA tendon-driven joints, agonistic–antagonistic actuation, cooling-enhanced thermal management, and feedback control, this research aims to realize human-like finger motion in a compact and compliant robotic system.
In addition to actuation, the research emphasizes anatomical fidelity. Key structures of the human finger, including cartilage, ligaments, palmar plates, tendon sheaths, pulley systems, and the extensor hood mechanism, are incorporated into soft-rigid hybrid robotic fingers. Recent work further explores monolithic multi-material FDM fabrication, where rigid skeletal structures and compliant soft-tissue-like components are integrated in a single printing process. This approach aims to improve anatomical consistency, repeatability, and manufacturability for future biomimetic robotic hands, prosthetic devices, and human–robot interaction systems.
About this research group
The Highly Biomimetic Finger Research Group is centered on Liu’s HF3M Finger project, which explores highly biomimetic robotic fingers through SMA tendon actuation, anatomical structural design, and multi-material 3D printing. Within this group, students conduct bachelor’s and master’s thesis research on related topics, including robotic design, actuator development, fabrication methods, sensing, CV tracking and control.
The group also welcomes part-time researchers and collaborators who wish to contribute to shared research activities. Through collaborative work, the group aims to develop anatomically grounded robotic fingers and to advance practical technologies for future robotic hands, prosthetic devices, and human–robot interaction systems.
SMA wire joint actuation
SMA actuation joint
Published in: https://ieeexplore.ieee.org/abstract/document/10216073
Antagonistic SMA Muscle actuation joint under feedback control
Published in: https://doi.org/10.3390/act12110415
SMA driven Highly Biomimetic Robotic Finger
Published in: https://doi.org/10.3390/biomimetics9030151
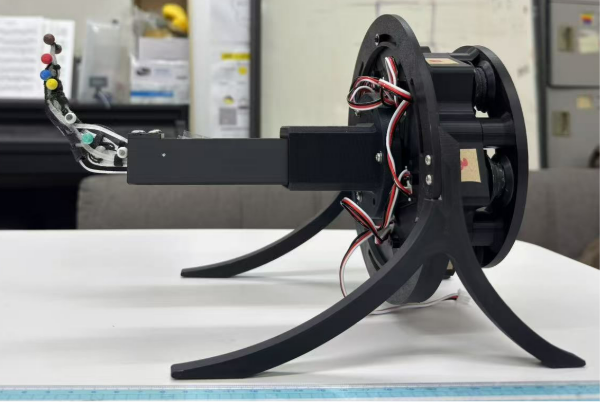
Experiment bench for highly-biomimetic finger (Developed together with Huakai Zheng)
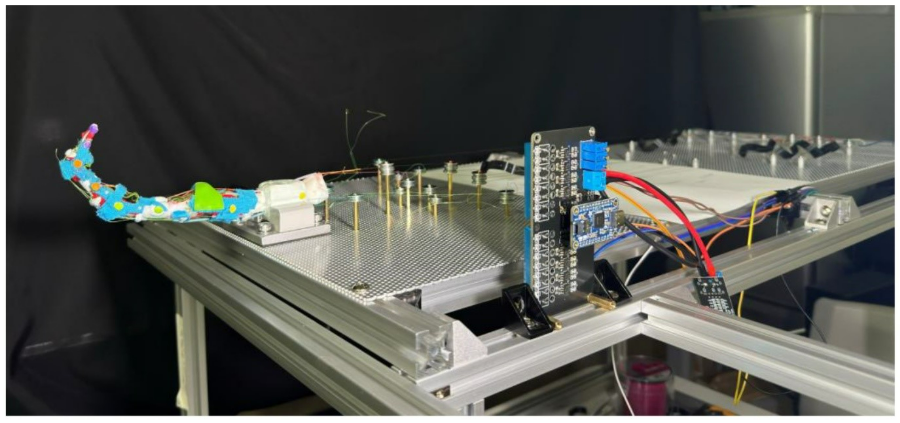
Experiment bench for highly biomimetic finger (PCB Developed together with Hiroki Endo)
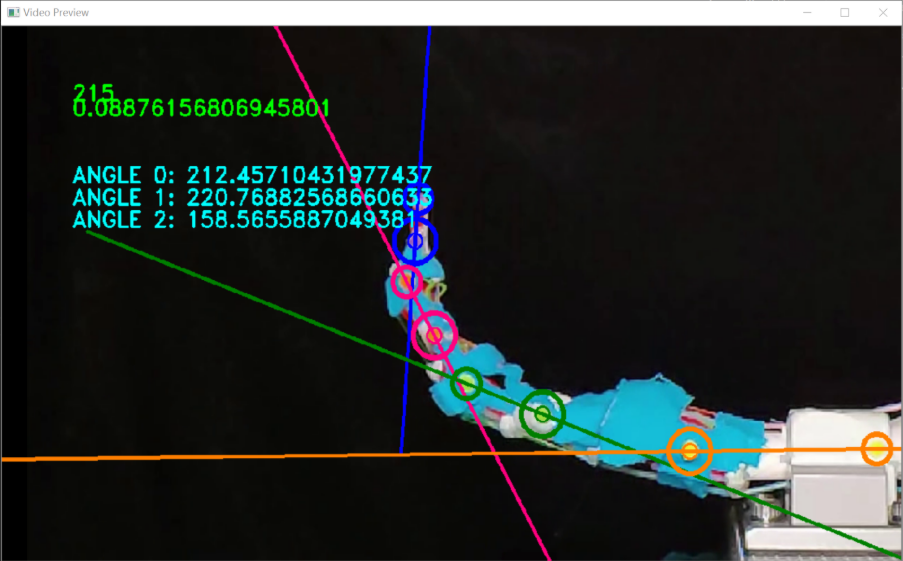
Highly Biomimetic Robotic Finger test system (CV Developed together with Dr. Maroš Hliboký)
High-Fidelity Monolithic Multi-Material (HF3M) FDM finger
Underpulichation (Written in PhD thesis)
High-fidelity finger that recreates soft tissues in finger anatomy

Endless tryryryryryryry
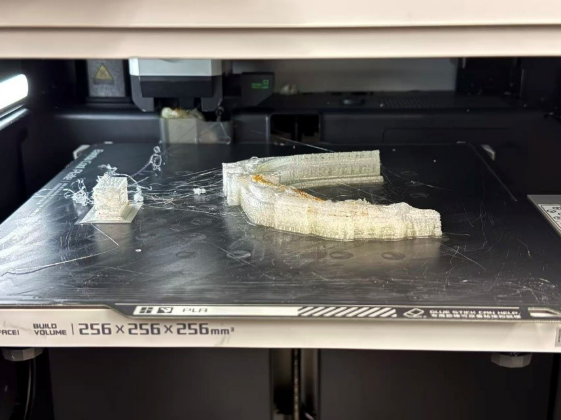
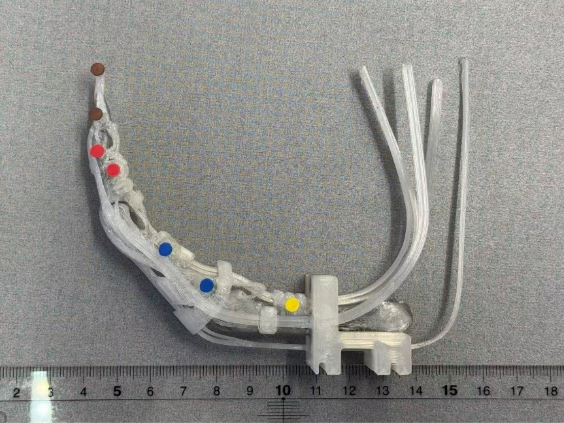

The HF3M FDM finger manufactured by Bambu X1C (with colored markers for CV)
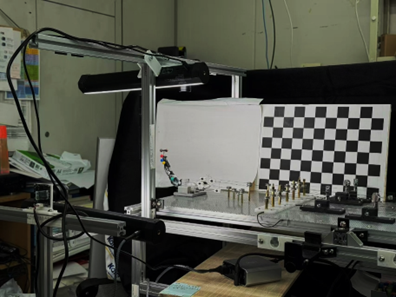
Experiment bench for HF3M finger (testbench developed together with Sota Amano)
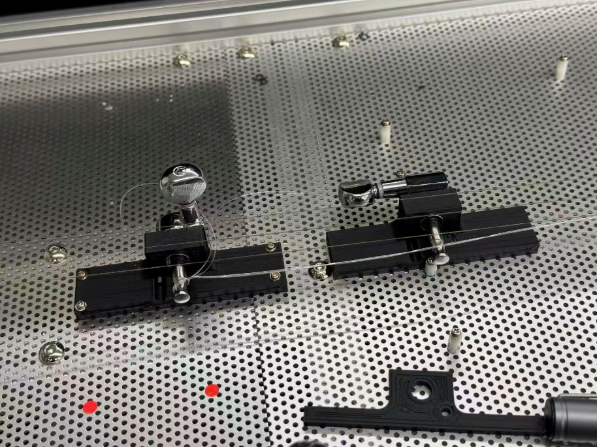
SMA-Length adjustor
Single Tendon Actuation test (FDP tendon driven by SMA muscle)
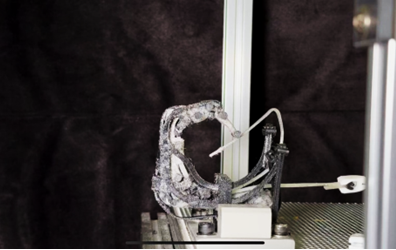
The HF3M finger driven by a 6-Dof servo bench (Servo driver developed together with Yutaro Okawa)
Collaborative Research
Liu is open to collaborative research in soft robotics, biomimetic robotic systems, SMA actuation, multi-material 3D printing, and robotic hands. In particular, he welcomes collaborations related to robotic structural design, actuator development, measurement and control systems, and anatomy-based biomimetic design inspired by human finger motion.
Adjustable super-thin wire winding machine
Modified robot arm for AI driven drawing Based on low-cost Amazon robot arm

Continuum stainless steel pin holder
SMA driven tactical handle for VR controller
Adjustable modular testing bench
Both for robotic finger validation and material sickness test
Workstation built for lab members

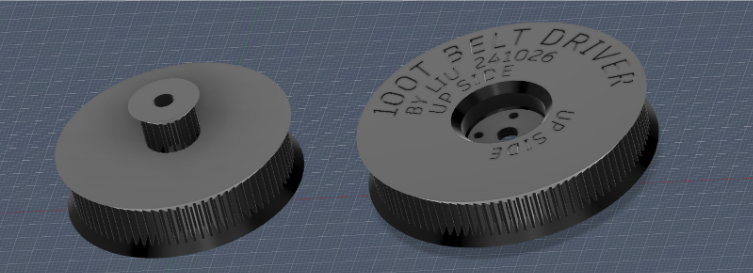
Belt driving gear built for lab members
About Renke Liu
Renke Liu enjoys hands-on activities that combine curiosity, practical problem-solving, and technical skills. Outside academic work, he is interested in figure skating, snowboarding, road cycling, photography, and he is also enthusiastic about electronic devices. He likes understanding how things work by taking them apart, adjusting them, repairing them, or improving their usability in everyday situations.
His personal strengths include careful observation, practical troubleshooting, mechanical intuition, and the ability to learn through direct experience. Whether working with cameras, bicycles, computers, or small electronic devices, he values precision, patience, and continuous improvement. Outdoor activities and photography also give him opportunities to explore movement, environments, and perspectives beyond the workspace.
Please feel free to discuss with Liu about your study, research, game and carrier plan, you are welcome to use both English, Chinese and Japanese.
Camera, Phone, Len, Mouse, PC, Laptops, Watch … … Ask Liu if you have trouble in your device.
Please join Sawada Lab Winter Seminar for an exciting Ski/Snowboard journey!
Moon (grayscale) @ Nishi-Waseda/A7RIV and Sigma 50-500 with 2x extender and MC-11