メンバー | Ning Kewei
Development of a wireless bionic robotic fish using SMA actuators
Soft robotics research has recently emerged as an active field with a plethora of exciting new ideas. Soft robots are made of soft materials and powered by electrically activated materials. They are frequently inspired by biological systems. Researchers have developed several soft robots that use smart materials as actuators, but Shape Memory Alloy (SMA) for soft robots has received little attention. Because of their fast response time, high deformability, and high-frequency response, SMA wires are considered to be ideal for robot actuators.
In this study, we develop a wireless bionic robotic fish with SMA wire actuators, consisting of a silicone tail and a body shell with a control circuit and a battery. To realize the underwater movement of the bionic robotic fish, we completed the design, fabrication, and testing of three generations of bionic robotic fish. The movement performance of the three generations of bionic robotic fish was analyzed separately. The motion data was analyzed, and machine learning was conducted by using the multilayer perceptron (MLP) to determine the relationship between the control parameters and the swimming behaviors.
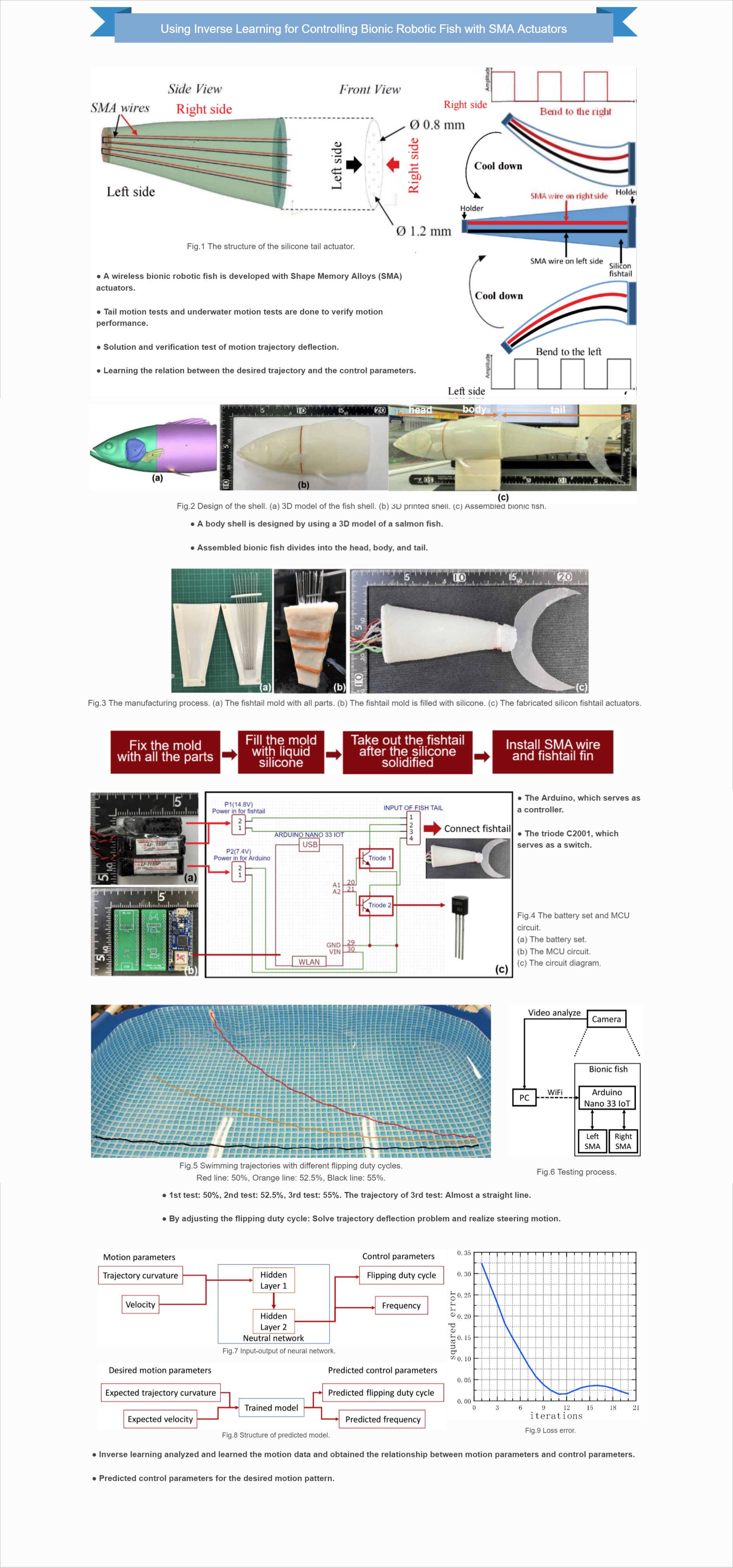
Swimming trajectories with different flipping duty cycles.
Red line: 50%, Orange line: 52.5%, Black line: 55%.
最近のコメント