メンバー | Prasetya Hutomo Sulaksono
Development of ERF Tactile Sensors Integrated into a Tendon Wire-Driven Soft Robotic Hand
Soft robotic hands have been significantly developed over the past few decades as a solution to the limitations of traditional rigid robotic systems. By utilizing soft and flexible materials, the soft robotic hands are able to grasp objects with ensuring minimal damage [1]. However, soft robotic hands also face several challenges—particularly regarding material durability. Silicone, a commonly used soft material, tends to wear out in the long run under repeated rotational movements [2].
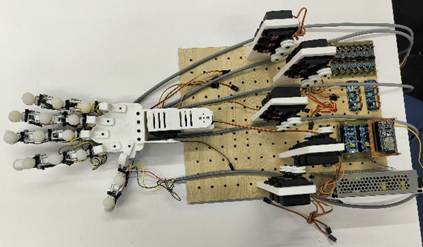
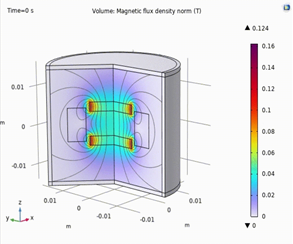
To address this issue, the ERF (Electro Repulsive Force) Magnetic Sensor is proposed with dual function: improving the durability of soft and flexible materials and providing tactile feedback. The ERF sensor replaces with repulsive magnets, which offer flexibility to maintain finger mobility while enhancing durability. By retaining the hard skeleton of the robotic hand, these sensors are installed at each finger segment and embedded with a copper coil that generates induction voltage in response to magnetic field changes caused by contact or pressure. This induction voltage serves as a tactile signal, allowing the soft robotic hand to sense touch.
References
[1] Y. A. AboZaid, M. T. Aboelrayat, I. S. Fahim, and A. G. Radwan, “Soft robotic grippers: A review on technologies, materials, and applications,” Sensors and Actuators A: Physical, vol. 372, 115380, 2024, doi: 10.1016/j.sna.2024.115380.
[2] S. Terryn et al., “A review on self-healing polymers for soft robotics,” Materials Today, vol. 47, pp. 187–205, 2021. doi: 10.1016/j.mattod.2021.01.009.