メンバー | 塩川 夕馬
災害現場や環境調査では、できるだけ早く正確に状況を把握することが欠かせません。しかし、危険な地形や狭い空間のために人や大型機材が近づけない場合が多くあります。そこで私たちは、手のひらサイズの小型ドローン、なかでも昆虫と同じくらいの大きさの飛行ロボットに注目しています。
昆虫は、体内の「間接飛翔筋」と翼の根元にあるヒンジ構造を使って、狭い場所でも自由自在に飛び回ります。この優れた運動性能を工学的に再現できれば、人が立ち入れない場所でも安全かつ迅速に情報を集められるようになります。しかし、構造の複雑さやエネルギー効率の問題で、従来の小型モーターではうまく模倣できませんでした。
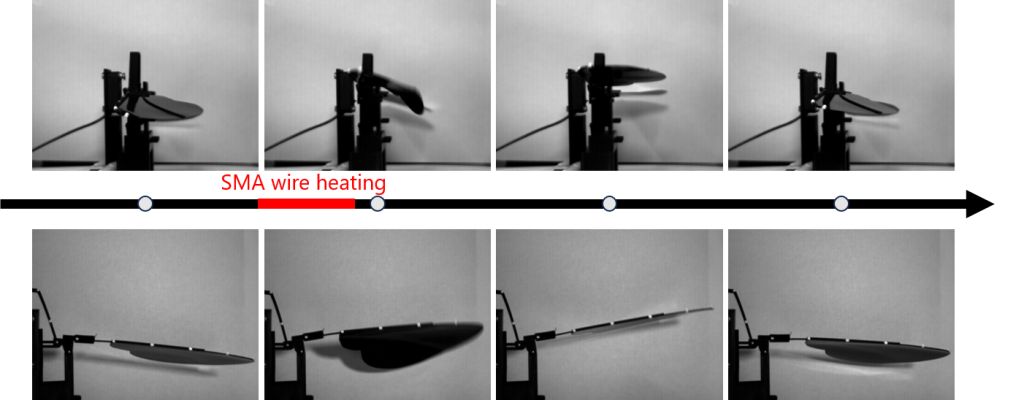
そこで私は、形状記憶合金(SMA)と3Dプリント技術を組み合わせ、昆虫の筋肉と関節の働きを模した羽ばたき機構を開発しています。SMAは通電加熱によって伸び縮みする軽量材料で、モーターよりもコンパクトな駆動源になります。これにより、昆虫のように効率的に羽ばたき、少ないエネルギーで飛行できるロボットを目指しています。
将来的には、崩落の危険がある建物の内部や深い森の中など、人が入りにくい場所での捜索・点検・環境モニタリングに役立てることを想定しています。昆虫から学んだしくみをロボットに取り入れることで、「小さくても頼りになる飛行ロボット」を実現し、社会の安全と環境保全に貢献することが目標です。
In disaster sites and environmental surveys, it is essential to grasp the situation as quickly and accurately as possible. However, dangerous ground and narrow spaces often prevent people and large machines from getting close. For this reason, we are turning our attention to palm-sized drones, especially flying robots that are about the same size as insects.
Insects fly freely even through tight gaps by using indirect flight muscles inside the body and tiny hinge joints at the base of their wings. If we can reproduce this excellent movement in engineering, drones will be able to collect information safely and quickly in places that people cannot enter. Yet the structure is so complex and the energy demands so strict that ordinary small motors have not been able to copy it well.
To solve this problem, I am building a flapping system that combines shape-memory alloy wire and 3-D-printed parts to imitate the muscles and joints of an insect. Shape-memory alloy is a light material that shortens when heated by electricity and lengthens when it cools, so it can act as a very small drive unit instead of a motor. With this material, I aim to create a robot that flaps like an insect and flies while using little energy.
In the future, I imagine these tiny robots helping in searches, inspections, and environmental monitoring inside buildings at risk of collapse or deep within dense forests where people find it hard to go. By bringing ideas learned from insects into robotics, my goal is to realize “small but reliable” flying robots that contribute to human safety and environmental protection